
우노
[BFS] 이코테 “블록 이동하기” Python 풀이 본문
문제
- 로봇개발자 "무지"는 한 달 앞으로 다가온 "카카오배 로봇경진대회"에 출품할 로봇을 준비하고 있습니다.
- 준비 중인 로봇은
2 x 1크기의 로봇으로 "무지"는 "0"과 "1"로 이루어진N x N크기의 지도에서2 x 1크기인 로봇을 움직여 (N, N) 위치까지 이동 할 수 있도록 프로그래밍을 하려고 합니다. - 로봇이 이동하는 지도는 가장 왼쪽, 상단의 좌표를 (1, 1)로 하며 지도 내에 표시된 숫자 "0"은 빈칸을 "1"은 벽을 나타냅니다.
- 로봇은 벽이 있는 칸 또는 지도 밖으로는 이동할 수 없습니다.
- 로봇은 처음에 아래 그림과 같이 좌표 (1, 1) 위치에서 가로방향으로 놓여있는 상태로 시작하며, 앞뒤 구분없이 움직일 수 있습니다.

- 로봇이 움직일 때는 현재 놓여있는 상태를 유지하면서 이동합니다.
- 예를 들어, 위 그림에서 오른쪽으로 한 칸 이동한다면 (1, 2), (1, 3) 두 칸을 차지하게 되며, 아래로 이동한다면 (2, 1), (2, 2) 두 칸을 차지하게 됩니다.
- 로봇이 차지하는 두 칸 중 어느 한 칸이라도 (N, N) 위치에 도착하면 됩니다.
- 로봇은 다음과 같이 조건에 따라 회전이 가능합니다.
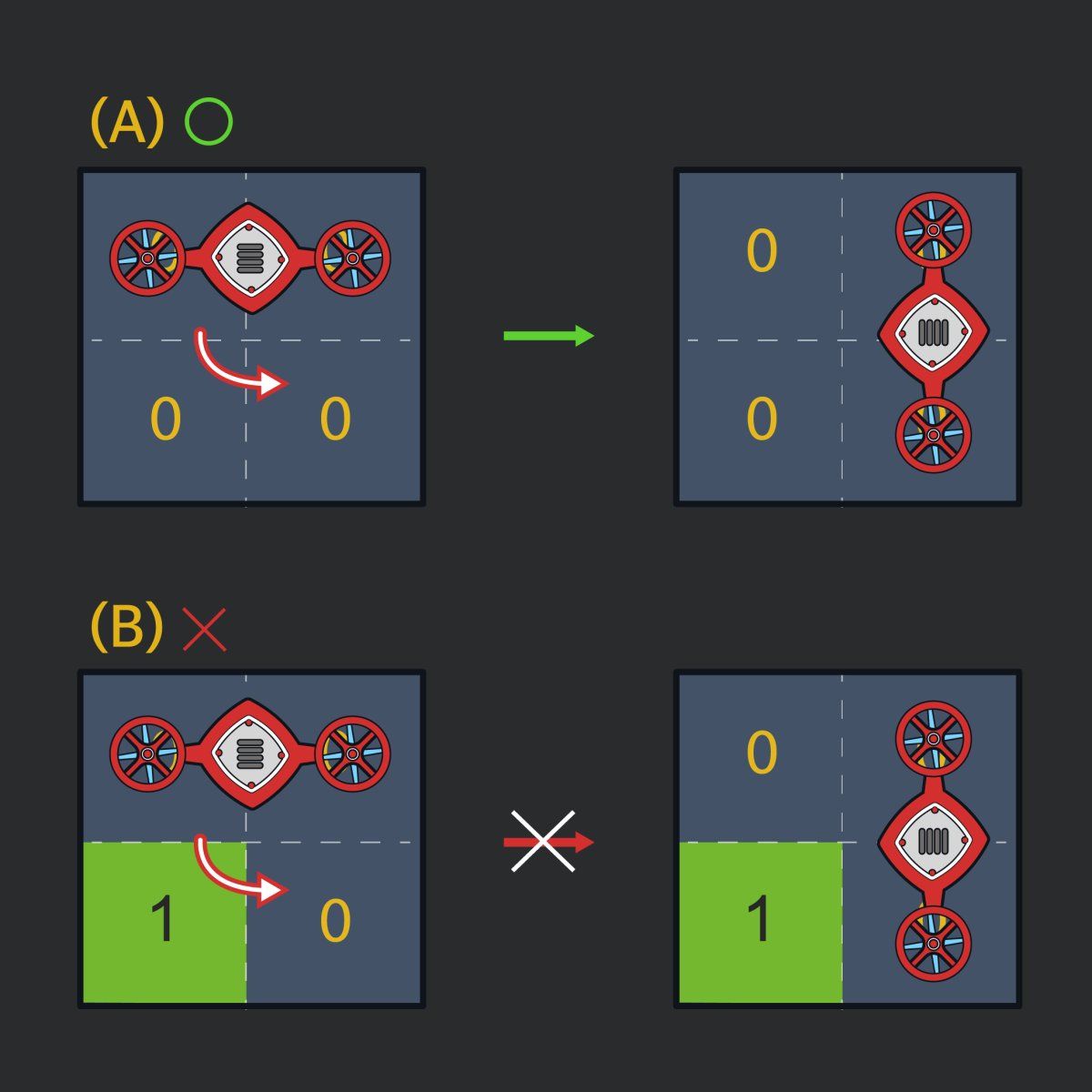
- 위 그림과 같이 로봇은 90도씩 회전할 수 있습니다.
- 단, 로봇이 차지하는 두 칸 중, 어느 칸이든 축이 될 수 있지만, 회전하는 방향(축이 되는 칸으로부터 대각선 방향에 있는 칸)에는 벽이 없어야 합니다.
- 로봇이 한 칸 이동하거나 90도 회전하는 데는 걸리는 시간은 정확히 1초 입니다.
- "0"과 "1"로 이루어진 지도인 board가 주어질 때, 로봇이 (N, N) 위치까지 이동하는데 필요한 최소 시간을 return 하도록 solution 함수를 완성해주세요.
제한사항
- board의 한 변의 길이는 5 이상 100 이하입니다.
- board의 원소는 0 또는 1입니다.
- 로봇이 처음에 놓여 있는 칸 (1, 1), (1, 2)는 항상 0으로 주어집니다.
- 로봇이 항상 목적지에 도착할 수 있는 경우만 입력으로 주어집니다.
입출력 예
<board>
[[0, 0, 0, 1, 1],[0, 0, 0, 1, 0],[0, 1, 0, 1, 1],[1, 1, 0, 0, 1],[0, 0, 0, 0, 0]]
<result>
7입출력 예에 대한 설명
- 문제에 주어진 예시와 같습니다.
- 로봇이 오른쪽으로 한 칸 이동 후, (1, 3) 칸을 축으로 반시계 방향으로 90도 회전합니다.
- 다시, 아래쪽으로 3칸 이동하면 로봇은 (4, 3), (5, 3) 두 칸을 차지하게 됩니다.
- 이제 (5, 3)을 축으로 시계 방향으로 90도 회전 후, 오른쪽으로 한 칸 이동하면 (N, N)에 도착합니다.
- 따라서 목적지에 도달하기까지 최소 7초가 걸립니다.
풀이
- 이 문제는 전형적인 BFS 문제 유형이다.
- 로봇이 차지하고 있는 위치가 두 칸이라고 해도, 위치 정보를 튜플로 감싼 뒤, 집합 자료형으로 관리한다면, 여전히 방문여부를 처리할 수 있다.
- 파이썬에서 {(1, 1), (1, 2)} 과 {(1, 2), (1, 1)}은 같은 집합 객체로 처리된다.
- 로봇이 차지하고 있는 두 칸에서, 이동하거나 회전할 수 있는 두 칸은, 모두 큐에 삽입한다.
- 이동의 경우, 단순히 상하좌우로 이동하는 모든 경우를 계산하면 된다.
- 하지만, 회전의 경우, 로봇이 가로로 놓여 있는 경우와 세로로 놓여 있는 경우를 모두 고려해, 회전이 가능한 경우를 계산해야 한다.
- 로봇이 가로로 놓인 상태에서 아래쪽으로 회전하는 경우
- 아래쪽 두 칸 중에서 하나라도 벽이 존재하면 안 된다.
- 로봇이 가로로 놓인 상태에서 위쪽으로 회전하는 경우
- 위쪽 두 칸 중에서 하나라도 벽이 존재하면 안 된다.
- 로봇이 세로로 놓인 상태에서 왼쪽으로 회전하는 경우
- 왼쪽 두 칸 중에서 하나라도 벽이 존재하면 안 된다.
- 로봇이 세로로 놓인 상태에서 오른쪽으로 회전하는 경우
- 오른쪽 두 칸 중에서 하나라도 벽이 존재하면 안 된다.
- 로봇은 90도씩만 회전할 수 있기 때문이다.
- 로봇이 가로로 놓인 상태에서 아래쪽으로 회전하는 경우
- 또한, 초기에 주어진 맵 외각에 벽을 둠으로써, 로봇이 맵을 벗어나지 않는지에 대한 범위 판정을 더 간단히 할 수 있다.
예제 코드
# https://school.programmers.co.kr/learn/courses/30/lessons/60063
from collections import deque
def get_next_pos(pos, board):
next_pos = [] # 반환 결과 (이동 가능한 위치들)
pos = list(pos) # 현재 위치 정보를 리스트로 변환 (집합 → 리스트)
pos1_x, pos1_y, pos2_x, pos2_y = pos[0][0], pos[0][1], pos[1][0], pos[1][1]
# (상, 하, 좌, 우)로 이동하는 경우에 대해서 처리
dx = [-1, 1, 0, 0]
dy = [0, 0, -1, 1]
# 가로, 세로와 무관하게, 현재 로봇이 놓여져있는 상태에서 상하좌우로 이동할 수 있는지 탐색
for i in range(4):
pos1_next_x, pos1_next_y, pos2_next_x, pos2_next_y = pos1_x + dx[i], pos1_y + dy[i], pos2_x + dx[i], pos2_y + dy[i]
# 해당 단계에선 이동하고자 하는 두 칸이 모두 비어 있는지(벽이 아닌지)만 판단
if board[pos1_next_x][pos1_next_y] == 0 and board[pos2_next_x][pos2_next_y] == 0:
next_pos.append({(pos1_next_x, pos1_next_y), (pos2_next_x, pos2_next_y)})
# 현재 로봇이 가로로 놓여 있는 경우, 세로로도 회전할 수 있는지 추가적으로 탐색
if pos1_x == pos2_x:
for i in [-1, 1]: # 위쪽으로 회전하거나, 아래쪽으로 회전
if board[pos1_x + i][pos1_y] == 0 and board[pos2_x + i][pos2_y] == 0: # 위쪽 혹은 아래쪽 두 칸이 모두 비어 있다면
# 왼쪽 칸을 기준으로 위, 아래로 회전
next_pos.append({(pos1_x, pos1_y), (pos1_x + i, pos1_y)})
# 오른쪽 칸을 기준으로 위, 아래로 회전
next_pos.append({(pos2_x, pos2_y), (pos2_x + i, pos2_y)})
# 현재 로봇이 세로로 놓여 있는 경우, 가로로도 회전할 수 있는지 추가적으로 탐색
elif pos1_y == pos2_y:
for i in [-1, 1]: # 왼쪽으로 회전하거나, 오른쪽으로 회전
if board[pos1_x][pos1_y + i] == 0 and board[pos2_x][pos2_y + i] == 0: # 왼쪽 혹은 오른쪽 두 칸이 모두 비어 있다면
# 위 칸을 기준으로 왼쪽, 오른쪽으로 회전
next_pos.append({(pos1_x, pos1_y), (pos1_x, pos1_y + i)})
# 아래 칸을 기준으로 왼쪽, 오른쪽으로 회전
next_pos.append({(pos2_x, pos2_y), (pos2_x, pos2_y + i)})
# 현재 위치에서 이동할 수 있는 모든 위치를 반환
return next_pos
def solution(board):
# 맵의 외곽에 벽을 두는 형태로 맵 변형
n = len(board)
new_board = [[1] * (n + 2) for _ in range(n + 2)]
for i in range(n):
for j in range(n):
new_board[i + 1][j + 1] = board[i][j]
# 너비 우선 탐색(BFS) 수행
q = deque()
visited = []
pos = {(1, 1), (1, 2)} # 시작 위치 설정
q.append((pos, 0)) # 큐에 삽입한 뒤에
visited.append(pos) # 방문 처리
# 큐가 빌 때까지 반복
while q:
pos, cost = q.popleft()
# (n, n) 위치에 로봇이 도달했다면, 최단 거리이므로 반환
if (n, n) in pos:
return cost
# 현재 위치에서 이동할 수 있는 위치 확인
for next_pos in get_next_pos(pos, new_board):
# 아직 방문하지 않은 위치라면 큐에 삽입하고 방문 처리
if next_pos not in visited:
q.append((next_pos, cost + 1))
visited.append(next_pos)
return 0참고
- 이것이 취업을 위한 코딩 테스트다. with python
'Algorithm > BFS' 카테고리의 다른 글
| [BFS] 이코테 “인구 이동” Python 풀이 (0) | 2022.09.15 |
|---|---|
| [BFS] 이코테 “경쟁적 전염” Python 풀이 (0) | 2022.09.11 |
| [BFS] 이코테 “연구소” Python 풀이 (0) | 2022.09.08 |
| [BFS] 이코테 “특정 거리의 도시 찾기” Python 풀이 (0) | 2022.09.08 |
| [BFS] 이코테 “미로 탈출” Python 풀이 (0) | 2022.06.05 |
'Algorithm/BFS' Related Articles
more


Comments